海底地殻変動観測
海上保安庁海洋情報部 佐藤まりこ, 渡邉俊一
東北大学大学院理学研究科 日野亮太
東北大学災害科学国際研究所 木戸元之, 長田幸仁
名古屋大学大学院環境学研究科地震火山研究センター 田所敬一
1. プレート境界地震のなぞに迫る
日本列島の沖合では, 東から太平洋プレートが, 南からフィリピン海プレートが日本列島のある陸側プレートの下に沈み込んでおり(図1-1), 日本は度々地震による被害を受けてきた. これらの地震の多くは, 「プレート境界地震」と呼ばれるタイプの地震で, 海洋プレート(太平洋プレートやフィリピン海プレート)が陸側プレート(日本列島)の下に沈み込むことにより, 陸側プレートが引きずり込まれてプレート境界にひずみが蓄積し, そのひずみが限界に達すると, ひずみを解放するように陸側プレートが跳ね上がって地震が発生するというしくみで起こる(図1-2). 例えば, 2011年3月に宮城県沖で発生した東北地方太平洋沖地震や南海トラフで100~150年ごとに発生してきたとされる東南海地震や南海地震はこのタイプの地震で, その震源域の大部分はプレート境界に近い「海域」にあると考えられている.
これらの地震に対して, 陸上では, 三角測量や水準測量, さらに1990年代以降はGPS観測によって, 地震による地殻変動や海洋プレートの沈み込みによる地殻変動が観測され, さまざまな知見が得られてきた.
しかしながら, プレート境界地震の震源域は海域にあるので, 発生した又は将来発生する地震の実態を理解するためには, 震源域である「海域」で地殻変動を測ることが望まれる. 海域における測地観測は, 海水があり海底まで電波が届かない, 容易に観測機器の設置・回収が行えない, 基準となる陸から遠いなどの技術的困難が多く, 1980年代から観測手法が提唱されていたにもかかわらず, なかなか実現には至らなかった. しかし, GPS衛星等による衛星測位技術の進展とともに, 海域での測位精度及び観測技術が向上し, 2000年以降, 本格的に海底での測地観測(海底地殻変動観測)が行われるようになった.
現在, 海底地殻変動観測として, その目的に応じた次の4手法があり, 日々, 観測及び技術開発が進められている.
・海底-海底間測距…断層等を挟むローカルな地殻変動(相対変位)を連続的に観測
・GPS/音響測距結合方式(GPS/A)…測地座標系における絶対変位を観測
・海底水圧計(OBP)…上下方向のトレンドの変化や地震時変位を連続的に観測
・ボアホールでの傾斜観測…ひずみの変化を連続的に観測
海底地殻変動観測で得られた海域の地殻変動データは, プレート間のひずみの蓄積状況の把握や地震時のすべり分布の推定に活用されている.
図1-1 日本列島とその周辺のプレート(「日本の地震活動 -被害地震から見た地域別の特徴- <追補版>」より)
図1-2 プレート境界地震の発生のしくみ(「日本の地震活動 -被害地震から見た地域別の特徴- <追補版>」より)
2. 海底―海底間測距による海底地殻変動観測
海底のプレート境界や断層における相対的な水平変動は, 2点間の音波の往復時間を計測して距離を求める海底間音響測距で観測できる(図2-1). 地形にもよるが, 水平距離が数km以下の場合には図にあるような音響測距装置を用いて, 2点間の距離を直接測定することができる. 新しいプレートが生成される中央海嶺や, プレートが相互に横ずれ運動しているトランスフォーム断層では, 主たる変動帯の幅は狭く, 基線長が1 kmもあればプレート間の相対運動をモニターできるところが多い. 陸からどんなに離れていても, 海底に複数の音響測距装置を設置するだけで, その間の距離変化を長期連続モニタリングできること, また海底で計測するため音速変化が表層に比べて小さいことがこの方式の利点である.
海底間音響測距は, 主局と従局との組み合わせで構成される. 主局は音波を送信し, 従局から返信された波形を収録, 従局は受信した信号を一定時間収録し返信するミラートランスポンダーである. 音響信号は, 音波信号の到達時刻を高精度に計測するために, GPS測位と同じようにコード化した信号を相関処理する方式など, レーダー用に開発されたパルス圧縮技術を採用している. 海流の影響などを避けるために, 音波の往復時間を計測する. 音響計測で得られた音波の往復時間を距離に換算するため, 各装置に温度や圧力計を装備している.
この観測方式を用いてJun de Fuca RidgeにあるAxial Seamountにおいて海底火山噴火時に4 cmの地殻変動が検出され(Chadwick et al., 1999) , 火山のマグマ活動の推定に用いられている. またJun de Fuca Ridgeの拡大軸では, 拡大軸は変位がなかったという結果が得られている(Chadwell et al., 1999). 他には, 東太平洋中央海膨のトランスフォーム断層での計測(McGuire et al., 2013)なども行われている. 東北大学のグループは熊野灘分岐断層で観測を行い, 2009年の低周波地震活動時海底での1 cmを超える変位がなかったと報告している(文献?). 現在では日本海溝近傍のプレート境界付近の超深海で計測が行われている.
図2-1 海底間音響測距の概念図 (Osada et al., 2008).
3. GPS/音響測距結合方式による海底地殻変動観測(GPS/A観測)
GPS/音響測距結合方式による海底地殻変動観測(GPS/A観測)は, 1985年に米国のスクリップス海洋研究所のSpiess教授によって提唱され, 1990年半ばに行われた観測により世界で初めて海底の動きを計測することに成功した(Spiess, 1985; Spiess et al., 1998). 日本では, 1990年代から技術開発が開始され, 2000年から日本海溝沿い及び南海トラフ沿いを中心に観測点を展開してキャンペーン観測が行われている(浅田・矢吹, 2001; Fujita et al., 2006; 藤本, 2006; 田所ほか, 2008)(図3-1).
GPS/A観測の原理を図3-2に示す. この観測では, 時々刻々と変化する船又はブイ(船上局)の位置をGPS観測により求めると同時に, 船上局と海底に設置した海底局の間の距離を音波で測り(音響測距観測), それらを組み合わせて海底アレイの中心位置をセンチメートルの精度で決定する. この観測を長期間(できれば5年以上)繰り返し行うことで, 海底の動きをモニターすることができる.
海底局は, 船上局から送信された音響信号を受信し, 一定時間後にそのままの形で返信する機能を持つミラートランスポンダで, 船上局では海底局からの返信信号を波形データとして記録する. 音響信号として10~12kHzの搬送波をM系列等の擬似乱数でコード化した信号を用いており, 相関処理により精度良く音響信号の往復時間を決定することができる.
また, 音響測距観測で得られた音波の往復走時を距離に換算するためには, 海中の音速度が必要となることから, 観測中は適宜CTD観測やXBT観測を実施している. しかしながら, 時間的にも空間的にも変化する海中音速構造を完全に把握することは不可能であり, 海中音速構造を解析的に推定するなど観測誤差の低減に努めている.
現在, 1回のキャンペーン観測の位置決定精度は2~3cmであるが, 5年以上の長期観測により1cm/year未満の精度で移動速度を推定することができる. これまでに, 海洋プレートの沈み込みによる地殻変動や地震に伴う地殻変動を検出している.
近年では,係留ブイによる即時観測・連続観測に向けた技術開発もなされている.
図3-1 GPS/A観測点の配置図(2014年3月現在).白抜きは,2011年3月11日の東北地方太平洋沖地震後に設置した点.(海上保安庁作成)
図3-2 GPS/A観測の原理
4. GPS/A観測の成果‐①日本海溝沿いの海底地殻変動‐
日本海溝では, 2000年代前半に約10点のGPS/A観測点が設置され, キャンペーン観測が行われてきた. 東北地方太平洋沖地震前のGPS/A観測結果を図4-1に示す. 東北地方太平洋沖地震前には, 北米プレートに対して宮城沖で4~5cm/年, 福島沖で約2cm/年の西~西北西向きの地殻変動が検出されていた(Sato et al., 2013). これらの動きは, 太平洋プレートの沈み込みによって, 陸側のプレートが引きずり込まれていることを示しており, 特に, 宮城沖ではプレート間の固着が強かったことが示唆された.
次に, 東北地方太平洋沖地震前後の観測から得られた地震時変位を図4-2に示す. 全てのGPS/A観測点で東南東方向の変位が検出された(Sato et al., 2011; Kido et al., 2011; 海上保安庁, 2012). これらの動きは, 陸上のGNSS観測結果と方向は整合的であるが, 陸上で観測された最大変位量(電子基準点「牡鹿」で5.3m)よりもはるかに大きい. 特に, 震央の東北東約50kmに位置する「GJT3」では, 東南東方向に約31m移動し, 約4m隆起したという結果が得られ, 海溝近傍での大きなすべりを裏付ける貴重な観測データとなった. また, 上下方向では, 陸上のGPS観測結果が全て沈降を示したのに対し, 海域では「宮城沖2」を除く全てのGPS/A観測点で隆起が見られた. 海溝軸に直交する「宮城沖1」-「宮城沖2」-「牡鹿」で, 隆起から沈降への変化する様子が捉えられており, 陸側プレートの跳ね上がりから予想される変位と整合的である. 海底で得られた地殻変動は, 陸上のGPS観測データとともに, 東北地方太平洋沖地震の発生メカニズムの理解に活用されている.
さらに,東北地方太平洋沖地震後も観測は継続されており,図4-3に示す変位が得られている(Watanabe et al., 2014).「宮城沖1」など,地震時に20 m を超える大きな変位が得られたGPS/A観測点では,顕著な西向きの動きと沈降の傾向が捉えられている.これは,沿岸域のGNSS観測で得られた東向き・隆起という変位と正反対である.大すべり域直上の海底で陸上と正反対の動きが実測されたことは,地震後の地殻変動において粘弾性的な効果が主要な役割を果たしていることを直接的に示す証拠となった.一方,震源域南部の「福島沖」では,大すべり域とも沿岸域とも異なる東向き・沈降の変位が観測されている.
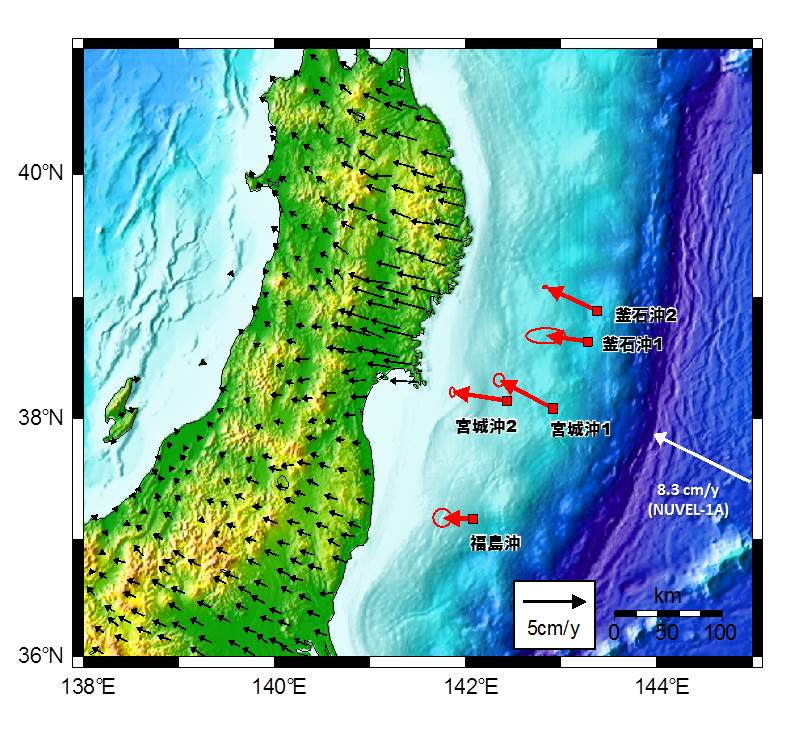
図4-1 太平洋プレートの沈み込みによる地殻変動(東北地方太平洋沖地震前, 北米プレート固定)(Sato et al., 2013). 観測期間は, 釜石沖1及び2:2002/7-2010/11, 宮城沖1及び2:2006/12-2011/2, 福島沖:2002/7-2008/3. 陸上の矢印は, 電子基準点の動きを示す.
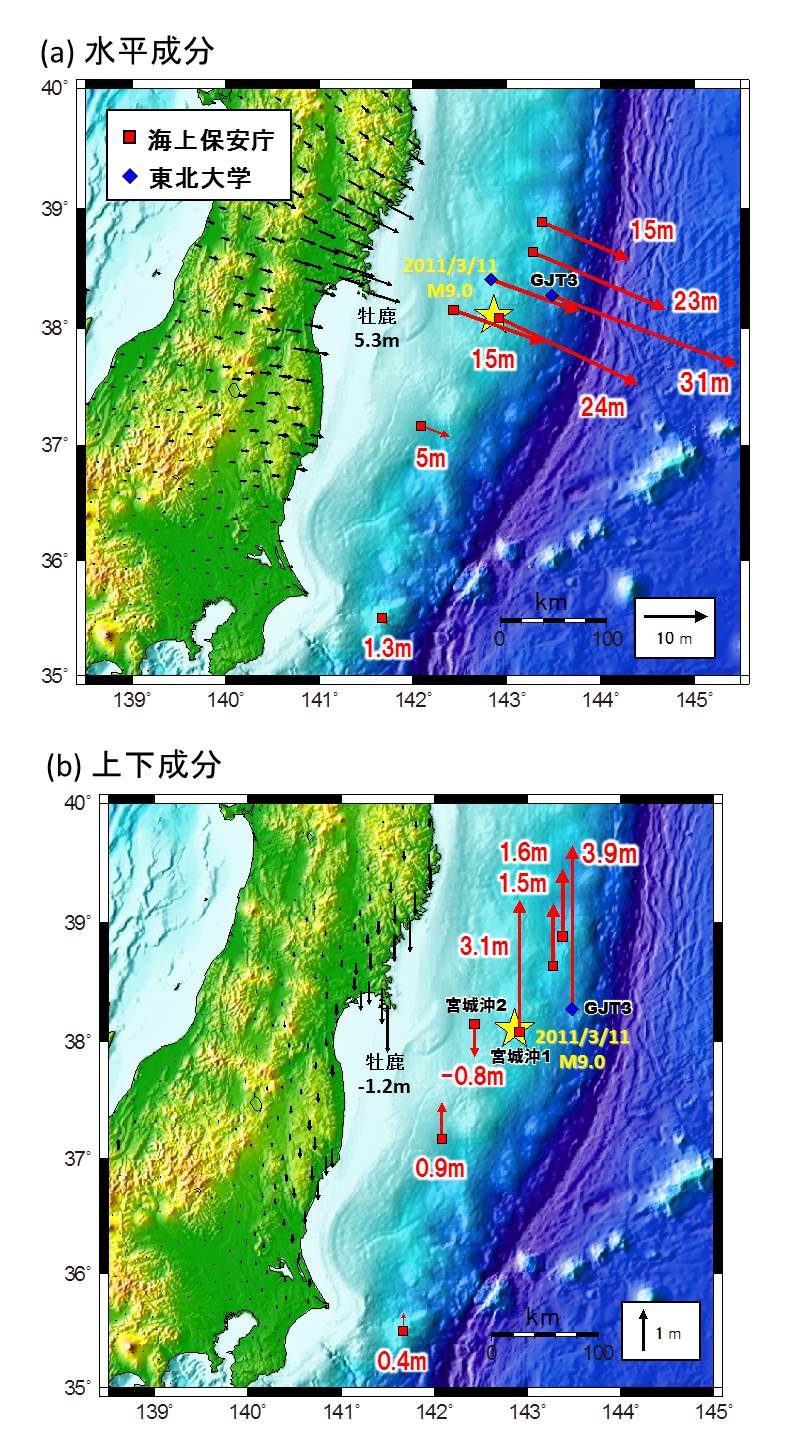
図4-2 東北地方太平洋沖地震に伴う海底地殻変動(Sato et al., 2011; Kido et al., 2011; 海上保安庁, 2012). 陸上の矢印は, 電子基準点の動きを示す.
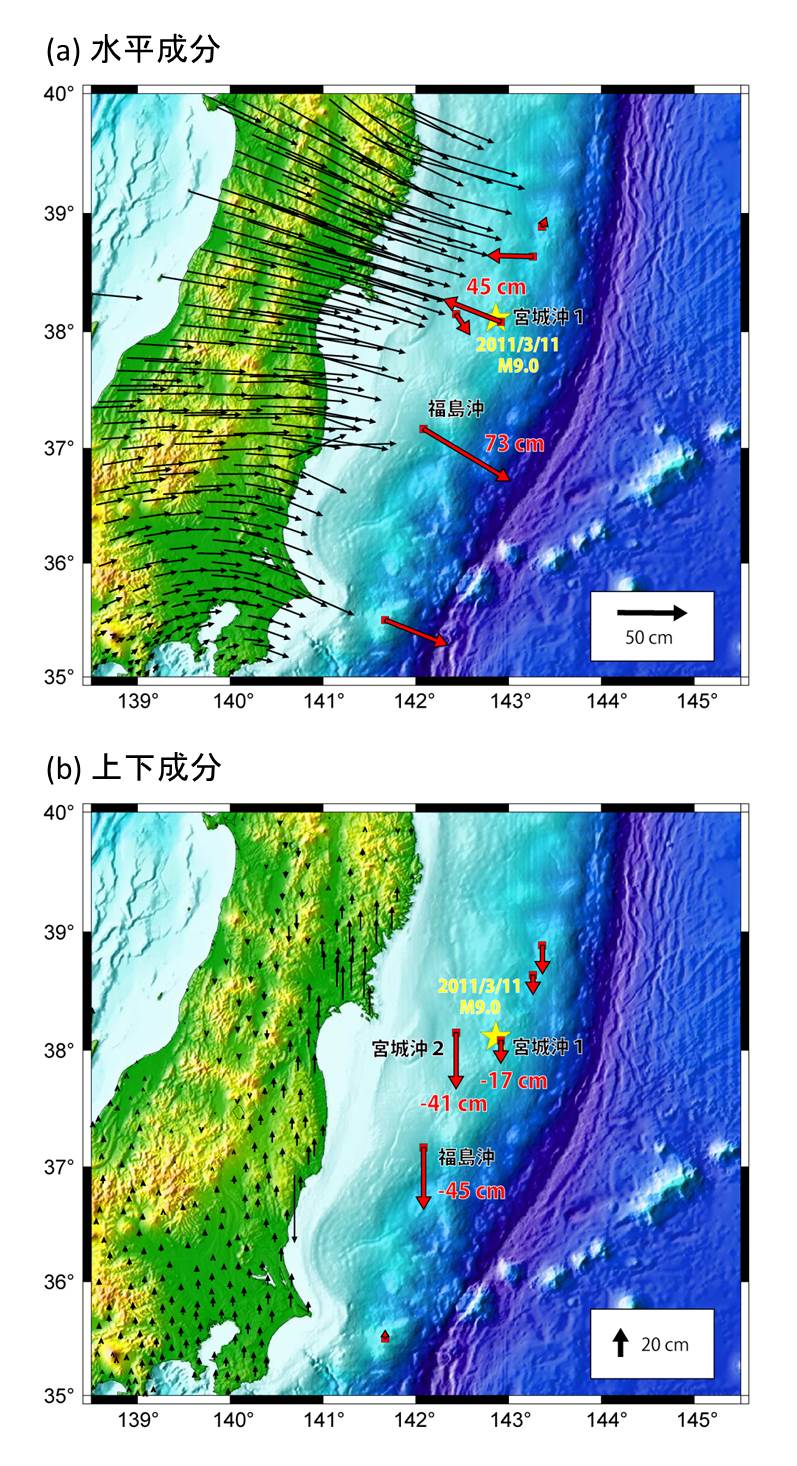
図4-3 東北地方太平洋沖地震後の海底地殻変動(北米プレート固定)(Watanabe et al., 2014).基準期間は,宮城沖1,2及び福島沖で2011年3月末,釜石沖1及び2で2011年4月初め,銚子沖で2011年4月中旬.比較期間は,銚子沖以外で2014年1月,銚子沖で2013年9月.陸上の矢印は,2011年4月から2014年1月までの電子基準点の動きを示す.余震等の影響は除いていない.
5. GPS/A観測の成果‐②駿河—南海トラフ沿いにおける海底地殻変動
駿河—南海トラフ沿いでは, 2000年代前半に駿河湾最北部から室戸岬にかけての海域に, 海上保安庁, 名古屋大学, 東北大学によって, 合計15ヵ所のGPS/A観測点が設置され, キャンペーン観測が行われてきた.
駿河湾で2005年頃から行われている観測によると, トラフの両側の2観測点において共に年間約4cmの西向きの変位速度ベクトルが得られている(図5-1). これらの地殻変動が伊豆側のプレートの沈み込みによるものとすれば, 駿河トラフ北端部ではプレート間がほぼ完全に固着していると考えられる.
南海トラフでは, 2005年頃からの観測によって, 西北西方向に年間2~5cmのフィリピン海プレートの沈み込みに伴う地殻変動が観測されている(図5-2)(Tadokoro et al., 2012; 海上保安庁, 2012). 名古屋大学による熊野海盆での観測結果(西北西方向に年間約4cm)をすべり欠損モデル(Savage, 1983)による理論的な地殻変動パターンと比較することにより, 熊野海盆直下では10km以深において0.6~0.8程度の固着率でプレート間が固着していることが明らかになった(Tadokoro et al., 2012).
2011年の東北地方太平洋沖地震後には, 南海トラフで想定されている最大クラスの地震の震源域をカバーするべく四国沖を中心に10か所の観測点が設置された. さらに, 2013年には, トラフ軸近傍におけるすべり欠損および沈み込むフィリピン海プレートの動きを直接的に測定するため, 紀伊半島南東沖の南海トラフの両側2ヵ所に新たな観測点が設置された.
>
図5-1 駿河トラフ北端部における海底地殻変動観測結果(名古屋大学による). Sella et al. (2002) のオイラーベクトルを用いて求めたアムールプレートに対する変位速度を示す. 陸上の変位速度ベクトルは国土地理院GEONETによる.
図5-2 南海トラフにおける海底地殻変動観測結果(2014年2月現在;海上保安庁・名古屋大学による). Sella et al. (2002) のオイラーベクトルを用いて求めたアムールプレートに対する変位速度を示す. 陸上の変位速度ベクトルは国土地理院GEONETによる.
6. 海底圧力観測
海底の上下変動を測る現実的な方法は海底の圧力観測である. 小型・軽量・高精度の圧力センサーのデータを海底で収録することにより, 海底の上下変動をcm程度の分解能で計測することが可能であり, 長期連続観測と機動的探査の双方が実現されている.
海底で観測される圧力変動は, 海底の上下変動による成分・海面と海洋内部の変動に起因する成分・センサーの長期ドリフトに起因する見かけの圧力変動成分からなる. 従って, 観測記録から海底上下変動による変動を抽出するためには, 残りの成分を推定して観測記録から除去する手続きが必要となる.
多くの場合, 海底圧力データに最大の影響を及ぼすのは海洋潮汐による海面変動であるが, 連続時系列に含まれる潮汐成分の推定手法が確立しているため, これにより効果的に低減することができる. その他, 周波数フィルタを適用して除去したり, 海洋潮汐モデルの予測値を差し引く方法も用いられる.
非潮汐性の海洋変動成分の除去には, 近接する観測点で観測される圧力変動の相似性を利用する方法がしばしば用いられる. 一般に海洋変動の波長は100km以上であるため, 数十km程度までの観測点間隔であれば, 海洋変動に起因する圧力変動成分は複数の海底観測点でコヒーレントな変動として現れる. 地殻変動の特徴的空間スケールがそれより十分に小さければ, 空間的にコヒーレントな成分をノイズと見なし観測記録から除去することにより, 検出が可能となる. この種の手法として最も簡単なのは, 隣接する観測点間の圧力差をとる方法であり, その他多点観測のデータを用いた主成分分析も有効である. また, 気象再解析モデルで駆動される海洋の運動を数値的に再現することによって, 海洋変動に起因する海底圧力変動成分を決定論的に推定する手法も提案されている.
測地学的な目的で海底圧力観測を行う場合に, 圧力センサーの長期的安定性がしばしば問題となる. 現在の海底観測で使用されるほとんどのセンサーは, 海底変動にして数cm/年に相当するような長期ドリフトをもつ. 観測を継続している間のドリフト特性は安定しているため, 数cm/月程度より大きな変動レートを伴う過渡的な地殻変動現象は機器ドリフト成分と分離して検出すること可能であるが, それよりゆっくりとした地殻変動はドリフト成分との分離が困難である. そうしたゆっくりとした海底上下変動を観測する手法として, 海底に安定したベンチマークを設け, そこでの海底圧力を注意深く校正されたセンサーで長期間にわたり繰り返し測定する手法が提案されている.
東北大学などのグループは, 日本海溝沿いにおいて自己浮上式の観測システムを用いた海底圧力の多点連続観測を実施し, 東北地方太平洋沖地震に伴う地震時海底変動の他, 同地震の発生に先行したゆっくりすべりによる変動, 同地震後の余効変動を捉えることに成功した.
米国のスクリプス海洋研究所などのグループは, 海底ベンチマークを用いた繰り返し観測により, 数年の間隔で繰り返し噴火する海底火山の山体変形の過程を捉えることに成功した.
日本を含む世界各地で海底ケーブル式の観測網の構築が精力的に進められている.こうした観測システムは,沖合での早期津波検知を主目的として,海底での圧力を精密に計測する機能を有するため,得られる長期間の連続した海底圧力時系列を活用することにより,海底上下変動のリアルタイム監視が実現することが期待され,実際そのための試みが,海洋研究開発機構などによって進められている.